Glossar: Fachbegriffe rund um das Thema Lenkung
Von A wie Allradlenkung bis U wie Untersteuern – Lenkungssysteme bringen eine Menge Fachtermini mit sich. Im Glossar zum TechTalk Lenkung erklären wir die wichtigsten Begriffe.
A für
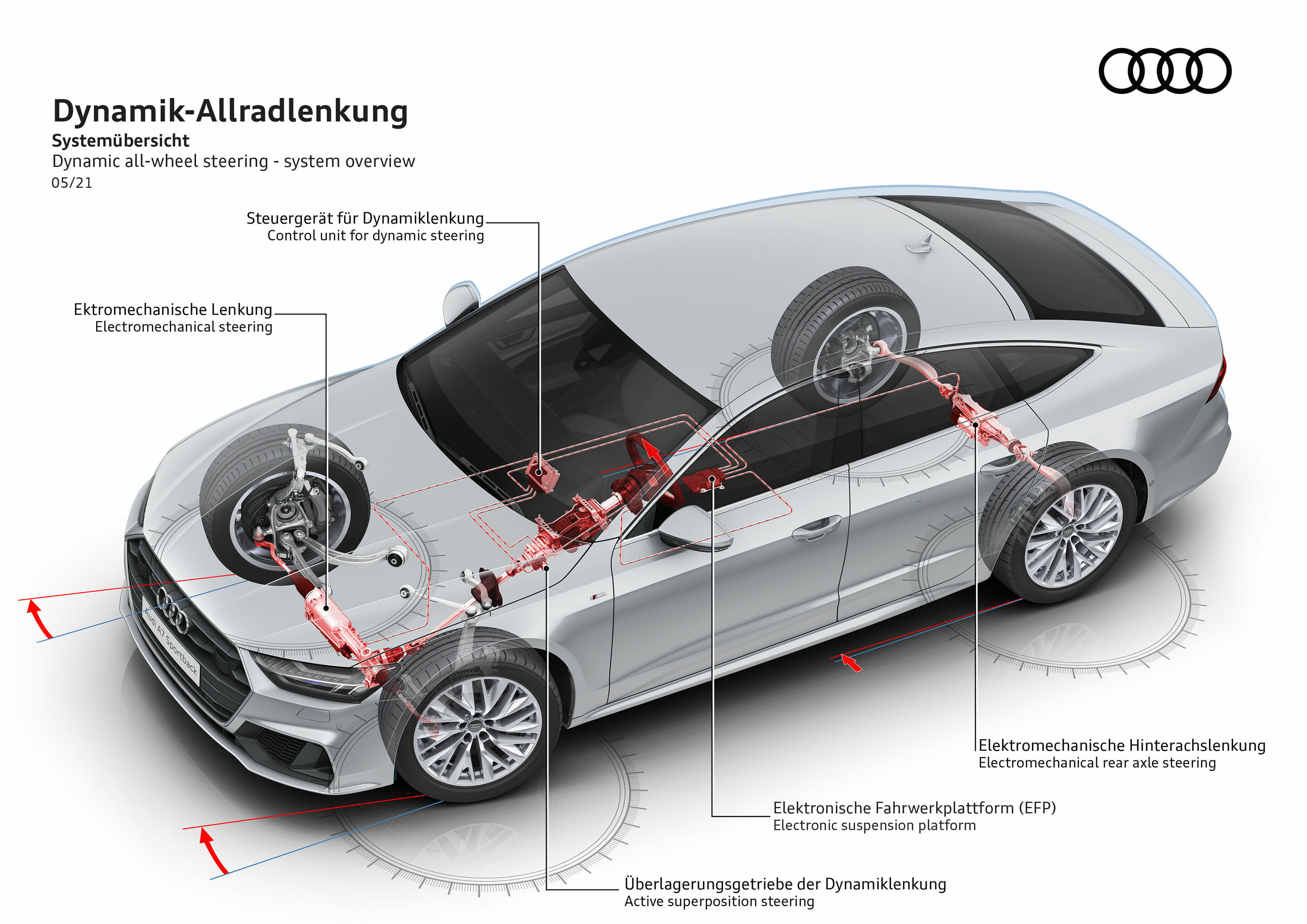
Allradlenkung:
Statt wie üblich nur die Vorderräder zu lenken, können Fahrzeuge mit einer Allradlenkung die Hinterräder steuern. Daher wird diese Lenkung auch Hinterachslenkung genannt. Bei niedrigem Tempo schlagen die hinteren Räder bis zu fünf Grad in entgegengesetzter Richtung zu den Vorderrädern ein. So verkleinert sich der Wendekreis deutlich und die Handlichkeit beim Rangieren steigt. Gleichzeitig spürt die Fahrerin oder der Fahrer mehr Komfort und Stabilität bei höheren Geschwindigkeiten, da die Hinterräder hier bis zu zwei Grad gleichsinnig zu den Vorderrädern einschlagen. Das Lenksignal wird elektrisch an Stellmotoren und die Fahrwerkslenker der Hinterradaufhängung übertragen. Eine Erweiterung des Systems ist die Dynamik-Allradlenkung, bei der zusätzlich mit einem Überlagerungsgetriebe an der Vorderachslenkung die Lenkübersetzung variiert werden kann.
D für
Dynamiklenkung:
Die Dynamiklenkung variiert ihre Übersetzung um bis zu 100 Prozent, abhängig von der gefahrenen Geschwindigkeit, vom Lenkwinkel und dem im Fahrdynamiksystem Audi drive select gewählten Modus. Das zentrale Bauteil ist ein Überlagerungsgetriebe in der Lenksäule. Zunächst überträgt es die Lenkbefehle des Fahrers genauso direkt wie bei einem Fahrzeug mit einer herkömmlichen Lenksäule. Eine direkte mechanische Verbindung zum eigentlichen Lenkgetriebe an der Vorderachse und das damit verbundene Feedback zu den Kräften an den Rädern ist genauso gegeben. Wenn das Überlagerungsgetriebe vom Elektromotor angesteuert wird, addiert oder subtrahiert es Lenkwinkel, wodurch die Lenkübersetzung permanent entsprechend der jeweiligen Fahrsituation angepasst wird. Das verbessert je nach Geschwindigkeit und Fahrsituation Lenkkomfort und Spurverhalten. Bei niedrigem Tempo – im Stadtverkehr und beim Rangieren – arbeitet die Dynamiklenkung sehr direkt, zwei Lenkradumdrehungen genügen von Anschlag zu Anschlag. Auch die Servo-Unterstützung ist hoch. Das erleichtert Parken und Rangieren. Auf der Landstraße gehen die Direktheit und die elektrische Unterstützung sukzessive zurück. So glätten bei zügigem Autobahntempo eine indirekte Übersetzung und eine niedrige Servokraft unruhige Lenkbewegungen und unterstützen den souveränen Geradeauslauf.
G für
Geradeauslauf:
Mit Geradeauslauf wird die Fähigkeit des Fahrzeugs bezeichnet, ohne große Lenkkorrekturen geradeaus zu fahren. Ein stabiler Geradeauslauf ist nicht nur von der Lenkung, sondern auch von Fahrwerk, Bereifung, Aerodynamik und Windverhältnissen abhängig.
Giermoment:
Das Giermoment wird erzeugt, wenn das Fahrzeug in eine Kurve fährt. Es ist ein Maß für die Drehung um die Hochachse. Je höher die Geschwindigkeit ist oder je enger die Kurve, desto größer wird das Giermoment. Wird es zu groß, kann das Fahrzeug ausbrechen und sich unkontrolliert drehen, also schleudern. Diese Bewegung wird auch „Gieren“ genannt.
Grenzbereich:
Driften, Gefahrenbremsung auf unterschiedlichen Untergründen, Slalomfahrten oder äußerst enge Kurven bei hohem Tempo – beim Grenzbereich geht es um die Grenze der Fahrphysik.
L für
Lenkmoment:
Das Lenkmoment, auch Handmoment genannt, ist die Lenkkraft, die der_die Fahrende aufbringt. Es ist einer der wichtigsten Einflussgrößen für das Lenkgefühl.
Lenksäule:
Die Lenksäule ist ein zentrales Bauteil des Lenkungssystems. Sie stellt die mechanische Verbindung zwischen Lenkrad und Lenkgetriebe her. Die Lenksäule überträgt die Drehbewegung des Steuers an das Lenkgetriebe, das wiederum die Spurstangen in die entsprechende Richtung schiebt. Ebenso werden die vom Lenkgetriebe ausgehenden Drehmomente über die Lenksäule an das Lenkrad übertragen. Die tiefen- und höheneinstellbare Lenksäule sorgt dafür, dass Fahrer_innen unterschiedlicher Körpergröße eine individuell angepasste und somit optimale Sitzposition finden.
Lenkungsrücklauf:
Durch eine selbsttätige Rückstellung des Lenkrads in die Mittelstellung lässt sich nicht nur der Lenkkomfort beim Geradeauslauf verbessern, sondern auch das Sicherheitsgefühl beim Fahren. Ein ausbalanciertes Mittengefühl auch bei kleinsten Lenkwinkeln sorgt für optimale Präzision.
P für
Progressivlenkung:
Die elektromechanische Progressivlenkung steigert die Fahrdynamik und den Fahrkomfort. Ihre speziell verzahnte Zahnstange variiert die Übersetzung abhängig vom Lenkwinkel. Mit zunehmendem Einschlag wird die Übersetzung direkter. Im Stadtverkehr und beim Rangieren geht die Lenkarbeit dadurch zurück, in engen Kurven fährt sich das Auto noch agiler. Darüber hinaus passt die Progressivlenkung ihre Servo-Unterstützung an die gefahrene Geschwindigkeit an. Bei geringen Geschwindigkeiten wird diese für eine leichtere Manövrierbarkeit erhöht.
S für
Servolenkung:
Eine rein mechanische Lenkung wird allein von der Muskelkraft der Fahrerin oder des Fahrers bewegt. Die Servolenkung bietet hingegen eine elektromechanische, elektrohydraulische oder rein hydraulische Hilfe, durch die das Lenken im Stand, beim Einparken oder bei geringen Geschwindigkeiten deutlich erleichtert wird. Sie gehört zu den bedeutendsten Evolutionsschritten bei Lenkungssystemen. Ohne Servolenkung wären Autos mit heute üblichen Vorderachslasten und breiten Reifen gerade bei niedrigen Geschwindigkeiten nur schwer zu steuern. Die elektromechanische Servolenkung ist State of the Art und macht sämtliche Assistenzsysteme mit Lenkeingriff technisch erst möglich. Sie ist damit auch eine Schlüsseltechnologie für das automatisierte Fahren.
Steer-by-Wire:
Bei der Steer-by-Wire-Technologie (übersetzt: „Lenken via Kabel“) übernimmt eine digitale Steuerungstechnik Fahrvorgänge der Vorder- und Hinterachse – anders als bei konventionellen Systemen wie der Servolenkung, bei der Lenkrad und Lenkgetriebe mechanisch verbunden sind. Bei einem Steer-by-Wire-System gibt es keine Lenkwelle mehr im Fahrzeug. Vielmehr werden alle Lenkbefehle elektrisch über ein Steuergerät an einen Motor übermittelt, der die Lenkbewegungen schließlich ausführt und an die Räder weiterleitet.
U für
Übersteuern:
Beim Übersteuern neigt das Auto dazu, mit dem Heck zum Kurvenaußenrand zu schwenken beziehungsweise auszubrechen. Ursache dafür ist die Kombination aus zu hoher Geschwindigkeit und plötzlichen Lastwechseln oder Ausweichmanövern. In dieser Situation reicht der mögliche Seitenkraftaufbau der hinteren Räder nicht mehr für eine sichere Spurführung aus und es tritt hoher Schlupf auf. Übersteuern kann durch kontrolliertes Gegenlenken und Verzögern wieder ausgeglichen werden. Dem Übersteuern wirkt die Elektronische Stabilisierungskontrolle (ESC) entgegen: Sie bremst das kurvenäußere Vorderrad ab und reduziert das Drehmoment an den Rädern, um das Fahrzeug wieder auf den gewünschten Kurs zu bringen.
Untersteuern:
Beim Untersteuern verlieren die Vorderräder ihre Haftung und das Auto schiebt bei Kurvenfahrt über die Vorderachse zum Kurvenaußenrand. Werden die Längs- und Querkräfte zu groß, droht das Fahrzeug von der Fahrbahn abzukommen. Dem Untersteuern wirkt ebenfalls die Elektronische Stabilisierungskontrolle (ESC) entgegen: Sie verzögert das Hinterrad auf der Kurveninnenseite und kann über das Motormanagement auch die Antriebsleistung reduzieren, um das Auto zurück in die Spur zu bringen.